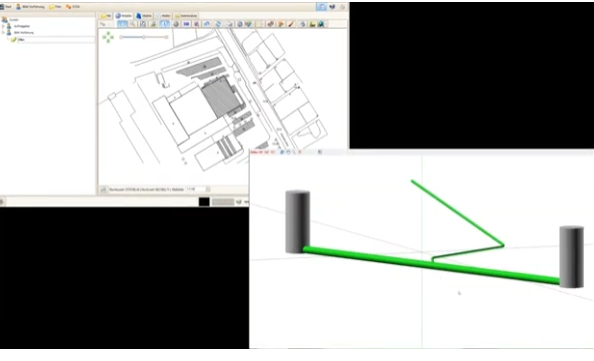
Generally the answer is no. The tilt readings collected are used to generate the grade maps. To calculate depth of the pipe, each reading is added the the previous reading. If the robot drives over a joint, or even a small rock, this could throw off the cumulative reading, making depth predictions unreliable.